Project-R3DS

Modellgenerierung
Algorithmus für jedes Bild:
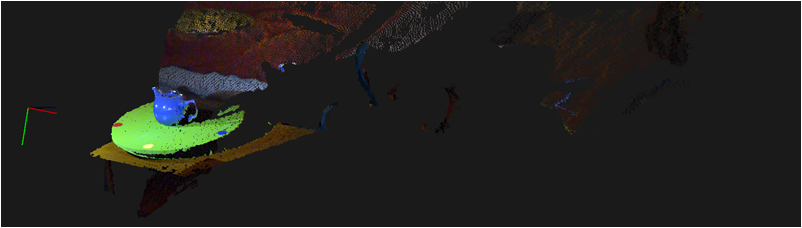
- Bilder einlesen und in Punktewolke umwandeln
- Grünen Teller herausfiltern
- Teller-Ebene berechnen
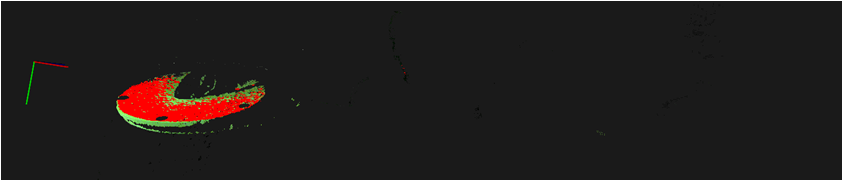
- Markerpositionen berechnen, Fünfeck zuschreiben
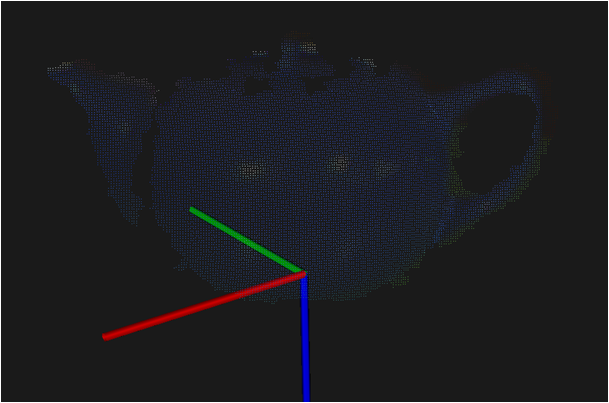
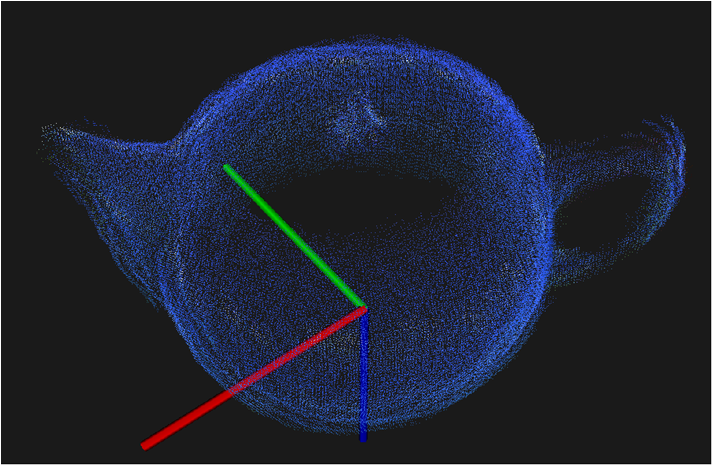
- Punktewolke transformieren:
- Fünfeck/Teller-Mittelpunkt → Ursprung
- Fünfeck/Teller → xy-Ebene
- Ortsvektor vom roten Marker zeigt in (1 0 0)
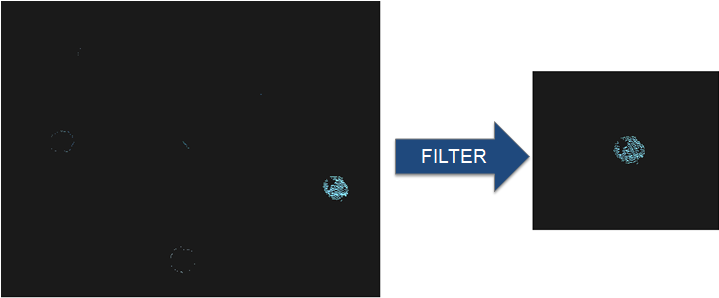
- Herausfiltern aller Punkte, die nicht zum Objekt gehören
- Objekt filtern
Auszug aus dem Quellcode:
// Calculating the plate center by found markers centroids
std::vector<Eigen::Vector3f> centers_vector;
for(int ctr = 0; ctr < 5; ctr++) {
Eigen::Vector3f marker_a, marker_b;
int ctr_a = ctr;
int ctr_b = ctr<4?ctr+1:0;
if(!IS_NAN(marker_centroids_vector[ctr_a][0]) && !IS_NAN(marker_centroids_vector[ctr_b][0])) {
marker_a = marker_centroids_vector[ctr_a];
marker_b = marker_centroids_vector[ctr_b];
// Calculate two possible centers
Eigen::Vector3f distance_vector = marker_b - marker_a;
Eigen::Vector3f possible_center_a = distance_vector.cross(plane_coefficients.head<3>());
possible_center_a = possible_center_a.normalized() * 0.1 * distance_vector.norm() * std::sqrt( 25.0 + 10.0*std::sqrt(5.0) );
Eigen::Vector3f possible_center_b = -possible_center_a;
possible_center_a += marker_a + 0.5*distance_vector;
possible_center_b += marker_a + 0.5*distance_vector;
// Select the center, which lies closer to centroid of green points
Eigen::Vector3f center;
if((possible_center_a - green_centroid.head<3>()).norm() < (possible_center_b - green_centroid.head<3>()).norm()) {
center = possible_center_a;
}
else {
center = possible_center_b;
}
centers_vector.push_back(center);
}
}
std::vector<Eigen::Vector3f> centers_vector;
for(int ctr = 0; ctr < 5; ctr++) {
Eigen::Vector3f marker_a, marker_b;
int ctr_a = ctr;
int ctr_b = ctr<4?ctr+1:0;
if(!IS_NAN(marker_centroids_vector[ctr_a][0]) && !IS_NAN(marker_centroids_vector[ctr_b][0])) {
marker_a = marker_centroids_vector[ctr_a];
marker_b = marker_centroids_vector[ctr_b];
// Calculate two possible centers
Eigen::Vector3f distance_vector = marker_b - marker_a;
Eigen::Vector3f possible_center_a = distance_vector.cross(plane_coefficients.head<3>());
possible_center_a = possible_center_a.normalized() * 0.1 * distance_vector.norm() * std::sqrt( 25.0 + 10.0*std::sqrt(5.0) );
Eigen::Vector3f possible_center_b = -possible_center_a;
possible_center_a += marker_a + 0.5*distance_vector;
possible_center_b += marker_a + 0.5*distance_vector;
// Select the center, which lies closer to centroid of green points
Eigen::Vector3f center;
if((possible_center_a - green_centroid.head<3>()).norm() < (possible_center_b - green_centroid.head<3>()).norm()) {
center = possible_center_a;
}
else {
center = possible_center_b;
}
centers_vector.push_back(center);
}
}