Softwarearchitektur-Phase 2
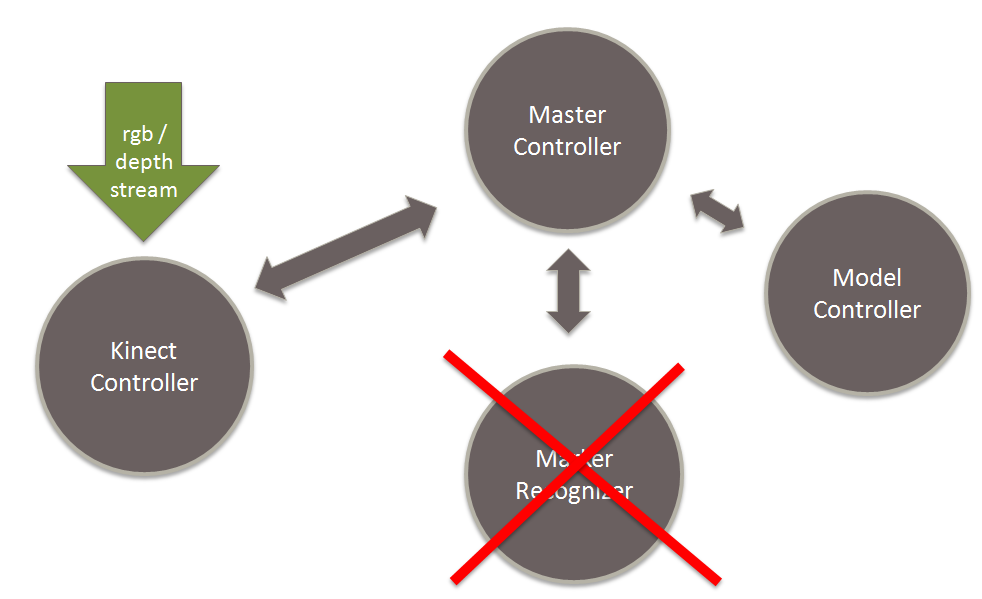
FĂĽr Phase 2 entschlossen wir uns dazu, die Aufnahme der einzelnen Bilder nicht mehr ĂĽber eine Markererkennung wie in Phase 1 des Projekts durch zu fĂĽhren, sondern ĂĽber einen fest definierten Zeitintervall. Aus diesem Grund gab es in Phase 2 keine Verwendung mehr fĂĽr den MarkerRecognizer:
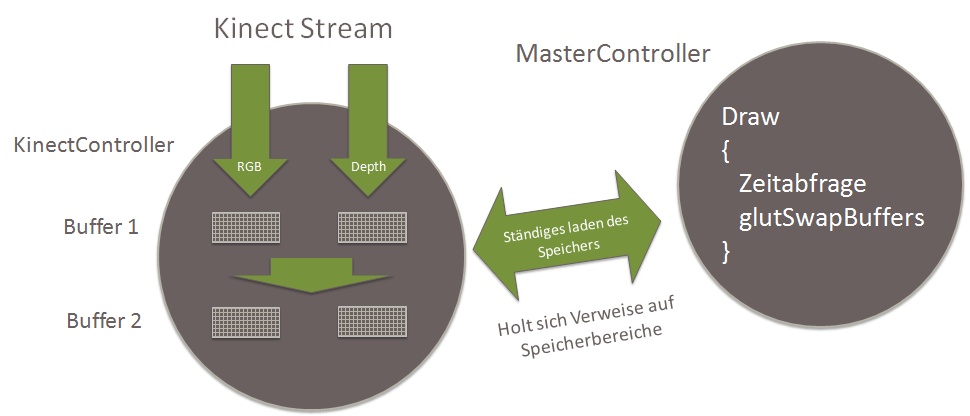
Diese Grafk soll den Fluss des Tiefen- und RGB-Streams in unserem Programm deutlich machen:
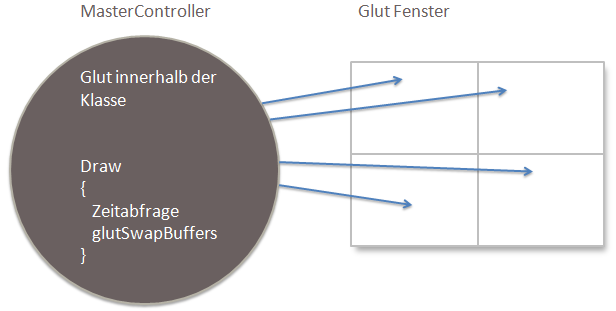
Hier sieht man, wie die GLUT in den MasterController eingebunden wurde. Das Fenster, welches in vier Teile unterteilt war, zeigt jeweils einmal ein Tiefen- und ein RGB-Bild an. In der oberen Zeile wird das jeweilige “Live-Bild” der Kinect angezeigt, in der unteren hingegen das jeweilige zwischengespeicherte Bild:
← Drehteller - Phase 2 | ● | Modellgenerierung →