CG Exercise #06
Computergraphik Ăśbungsblatt #06
OpenGL Tutorial: Hierarchische Modellierung
OpenGL: Roboterarm
Aufgabe 6.1: Roboterarm, Präliminarien

Verwendete Meshes
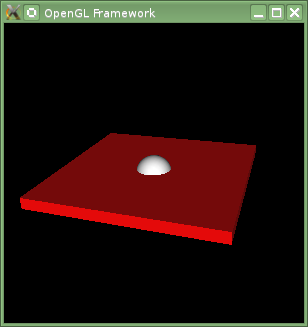
Starten Sie mit dem Quelltext robot.cpp.
Dieses Programm zeichnet einen Würfel und eine Kugel, und erlaubt die Höhe des Würfels mit Hilfe von Tastendrücken zu verändern. Machen Sie sich mit dem Quelltext vertraut, und analysieren Sie ihn.
Materialien:
- robot.cpp
- OpenGL Cheat Sheet
- Vorlesung: Hierarchie Ebenen
Aufgabe 6.2: Roboterarm, Grundplatte
Bisher wird ein Würfel und eine Kugel gezeichnet. Jetzt wollen wir aus diesen einfachen graphischen Grundkörpern einen Roboterarm zusammenbauen. Die Würfel werden die Armsegmente, die Kugeln die Gelenke usw. Wie der Arm des Roboters im Raum steht, wird durch die jeweiligen Drehwinkel an den Gelenken (d.h. den Roboterachsen) bestimmt.
Damit wir die einzelnen Elemente unabhängig voneinander bewegen können, werden wir den Arm mittels hierarchischer Modellierung aufbauen. Und um die einzelnen Elemente besser unterscheiden zu können, benutzen wir verschiedene Farben für die einzelnen Elemente.
Skalierte Basisplatte
Zeichnen Sie als erstes eine Grundplatte, in deren Mitte der Roboter StĂĽck fĂĽr StĂĽck aufgebaut wird. Skalieren Sie also den WĂĽrfel mit Hilfe einer Skalierungsmatrix (mat4::scale()) vor allem in der z-Achse so, dass er relativ flach wird.
In der Mitte zeichnen Sie eine Kugel, die das 1. Drehgelenk des anschließenden 1. Armsegments darstellen soll. Dafür benötigen wir eine ModelView-Matrix für ein lokales Koordinatensystem, welches in der Mitte der Basisplatte liegt. Alle weiteren lokalen Koordinatensysteme der Armsegmente bauen darauf auf. Diese Matrix berechnen wir daher zuerst und speichern diese in der Variable $MV$.
Dann setzen wir die ModelView-Matrizen vor dem Zeichnen der entsprechenden graphischen Primitve mit Hilfe von lglModelView(), da jedes Primitiv eine andere ModelView-Matrix nutzt. Die Projektions-Matrix ändert sich nicht, und muss daher auch nicht neu mittels lglProjection() gesetzt werden.
Aufgabe 6.3: Roboterarm, Erstes Segment
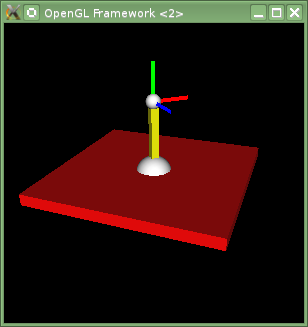
Erstes Segment
Zeichnen Sie dann das erste Armsegment. Dafür müssen Sie aufbauend auf der bisherigen ModelView-Matrix $MV$ weitere Transformationen durchführen, bevor Sie den nächsten Quader zeichnen. Sie brauchen dafür kein neues Objekt, Sie können das bereits existierende einfach ein zweites Mal zeichnen. Denken Sie daran, dass die Zeichenroutine das Koordinatensystem in der Mitte des Würfels erwartet, und dass der Würfel die Einheits-Kantenlänge 1 hat. Für das erste Segment wird der Würfel in der Höhe skaliert und um die Hälfte der Armlänge nach oben transliert.
Zeichnen Sie dann wieder ein Gelenk bzw. eine Kugel. Auch dieses Gelenk muss wieder an die richtige Stelle am Ende des Arms geschoben werden. Berechnen Sie keine Teilmatrizen doppelt, d.h. verwenden Sie wann immer möglich Matrizen, die bereits vorher berechnete wurden. Wir können die MV Matrizen bis auf die abschließende Skalierungsmatrix wiederverwenden, d.h. diese Teil-Matrix des letzten Elements ist die Basis für das nächste Element.
Drehen Sie nach obigem Prinzip nun den Arm um 45 Grad um seine eigene Achse (d.h. die Y-Achse).
Aufgabe 6.4: Lokales Modellierungs-Koordinatensystem
Es ist wichtig, sich zu erinnern, wo sich das jeweilige Koordinatensystem befindet, und welche Achse wohin zeigt - zeichnen Sie daher ein lglCoordSys-Objekt am jeweils oberen Ende des Arms.
Aufgabe 6.5: Rotation per Tastendruck
Ermöglichen Sie dem Arm, sich um seine eigene Achse zu drehen, wenn Sie z.B. die Tasten ‘q’ und ‘w’ drĂĽcken. Speichern Sie den Drehwinkel in einer Instanz-Variablen “angle”, und benutzen Sie ihn in der renderOpenGL()-Routine, um die ModelView-Matrix entsprechend zu modifizieren.
Aufgabe 6.6: Weitere Segmente
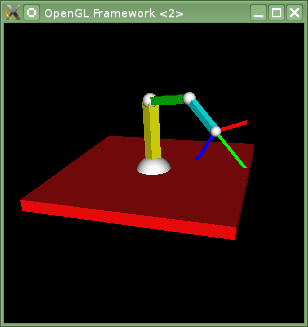
Roboterarm mit 3 Segmenten
Analog zu den vorherigen Schritten bauen Sie nun jeweils abwechslend ein weiteres Gelenk und ein weiteres Armsegment an, um zwei weitere Armsegmente zu realisieren. Diesmal rotieren die Armsegmente an den Gelenken um die X-Achse. Den Winkel stellen Sie mit passenden Tasten ein. Vergessen Sie nicht, eine andere Farbe fĂĽr diese Armsegmente zu verwenden.
Aufgabe 6.7: Greifer (Optional)
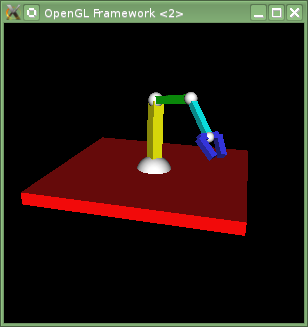
Roboterarm mit Greifer
Bauen Sie an das letzte Roboterarmsegment jetzt einen Greifer an, der sich um sein “Handgelenk” drehen kann, und seine Greiferfinger öffnen und schlieĂźen kann.
Aufgabe 6.8: Generative KI (Empfohlen)

Was ist Ihre Meinung?
Generieren Sie fĂĽr das glVertex-Framework ein laufendes Menneken mit Hilfe von Generativer KI!
Dokumentieren Sie Ihren Prompt im Protokoll und ergänzen Sie es um einen Screenshot!
Fragen:
- Welche Erkenntnisse haben Sie daraus gewonnen?
- Hat das generierte Programm auf Anhieb funktioniert?
- Welche Ă„nderungen mussten Sie vornehmen?
- Wie zufrieden sind Sie mit den Ergebnissen?
Welche Strategie im Umgang mit Generativer KI wĂĽrden Sie anderen empfehlen?
Videos on this topic:
- Linus on impact of AI on writing code in general: Video
- Linus on impact of AI on real workloads in industry: Video
Hausaufgaben bis zum nächsten Praktikum
Musterlösung: Bitte stellen Sie Ihre Lösung aus dem Praktikum kurz vor.
Diese Hausaufgabe ist teilweise eine Rechercheaufgabe: Bitte googlen oder schlagen Sie entsprechend in der Vorlesung nach, wenn Sie manche Begriffe noch nicht kennen!
1. OpenGL / Meshes:
In welchem Format sind Meshes in einer OBJ Datei gespeichert in Bezug auf folgende Schlagwörter:
- tri-stripping
- indexed face set
- triangle orientation (clockwise=cw / counter-clockwise=ccw)
- normal orientation (inside, outside)
- texture coordinates (range)
Tipp: Schauen Sie eine OBJ-Datei an - dies ist eine “lesbare” Text-Datei! Analysieren Sie deren Struktur und Inhalt!
2. OpenGL / Texturkoordinaten:
Ein Rechteck mit den Bildschirmkoordinaten (0 50), (100 50), (100 0) und (0 0) wird mit einer Textur mit einem 4Ă—4 Schachbrettmuster gefĂĽllt; dabei haben die 4 Eckpunkte die Texturkoordinaten (0.5 1), (1 0.5), (0.5 0) und (0 0.5).
- Skizzieren Sie das entstehende texturierte Rechteck. Zeichen Sie dazu erst die ganze Textur in Texturkoordinaten, und ĂĽberlegen Sie Sich in dieser Zeichnung, welcher Teil der Textur ĂĽberhaupt verwendet wird.
- Welche Texturkoordinate ergibt sich in der Mitte des Rechtecks?
3. OpenGL / Mip-Mapping:
- Recherchieren Sie das Prinzip des sog. “Mip-Mapping”
- Wieviele Stufen hat die MipMap-Pyramide fĂĽr obige Textur?
- Welche Farbe ergibt sich fĂĽr die letzte Stufe?